Published
UNCERTAIN DESCENT. NeurIPS 2019, ARXIV:1902.02476 / swa-gaussian (swag). a simple baseline for bayesian uncertainty in deep learning.
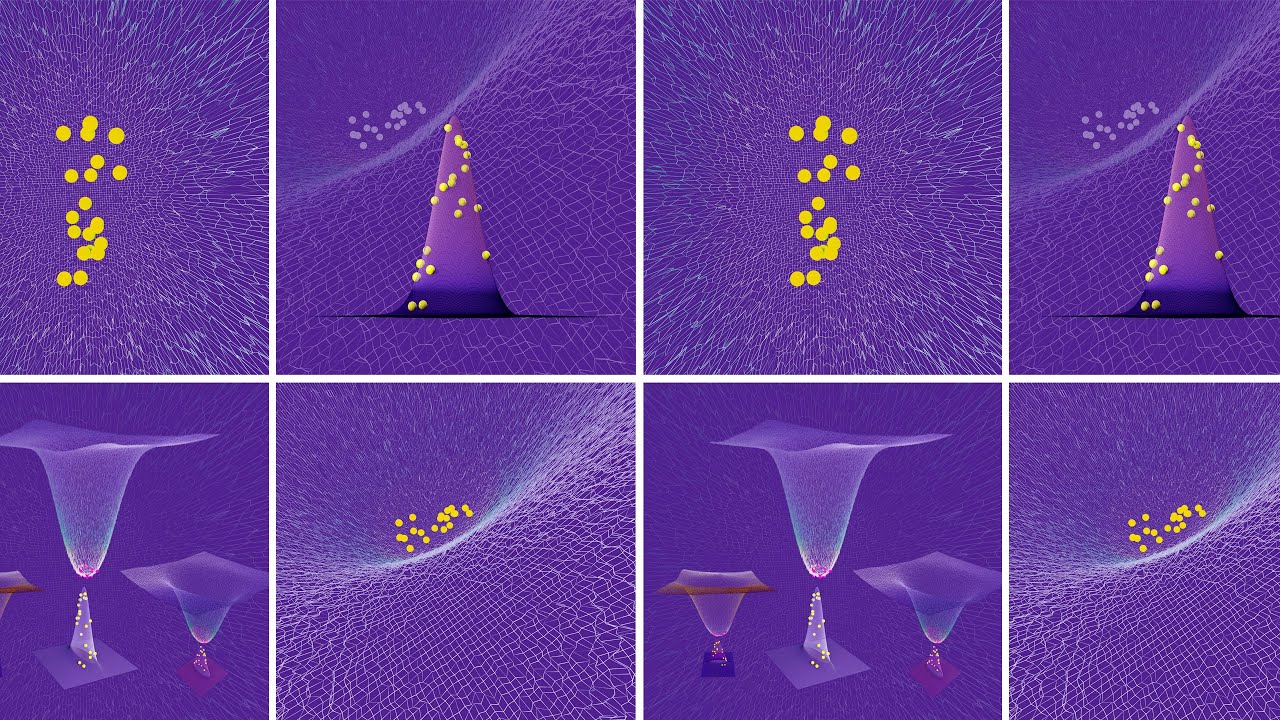
Real Data visualizations using PCA directions. From the authors of the paper: “Machine learning models are used to make decisions, and representing uncertainty is crucial for decision making, especially in safety-critical applications. Deep learning models trained by minimizing the loss on the train dataset tend to provide overconfident and miscalibrated predictions because they ignore uncertainty over the parameters of the model. In Bayesian machine learning we account for this uncertainty: we form a distribution over the weights of the model, known as posterior. This distribution captures different models that all explain train data well, but provide different predictions on the test data. For Neural networks the posterior distribution is very complex: there is no way to compute it exactly and we have to approximate it. A key challenge for approximate inference methods is to capture the geometry of the posterior distribution or, equivalently, the loss landscape.
The idea of our SWAG is to extract the information about the posterior geometry from the SGD trajectory. We start by pre-training a Neural Network with SGD, Adam or any other optimizer, to get a good initial solution. This part is the same as the standard training of the model. Starting from the pre-trained solution, we run SGD with a high constant learning rate. In this setting instead of converging to a single solution, SGD would bounce around different solutions that all explain the train data well. We then construct a Gaussian distribution that captures these different solutions traversed by SGD, and use it as our approximation to the posterior. It turns out that this simple procedure captures the local Geometry of the posterior remarkably well.”
Based on the paper by wesley maddox, timur garipov, pavel izmailov, dmitry vetrov, andrew gordon wilson. Visualization is a collaboration between pavel izmailov, timur garipov and javier ideami@losslandscape.com. NeurIPS 2019, ARXIV:1902.02476 | losslandscape.com..
Real Data visualizations using PCA directions. From the authors of the paper: “Machine learning models are used to make decisions, and representing uncertainty is crucial for decision making, especially in safety-critical applications. Deep learning models trained by minimizing the loss on the train dataset tend to provide overconfident and miscalibrated predictions because they ignore uncertainty over the parameters of the model. In Bayesian machine learning we account for this uncertainty: we form a distribution over the weights of the model, known as posterior. This distribution captures different models that all explain train data well, but provide different predictions on the test data. For Neural networks the posterior distribution is very complex: there is no way to compute it exactly and we have to approximate it. A key challenge for approximate inference methods is to capture the geometry of the posterior distribution or, equivalently, the loss landscape.
The idea of our SWAG is to extract the information about the posterior geometry from the SGD trajectory. We start by pre-training a Neural Network with SGD, Adam or any other optimizer, to get a good initial solution. This part is the same as the standard training of the model. Starting from the pre-trained solution, we run SGD with a high constant learning rate. In this setting instead of converging to a single solution, SGD would bounce around different solutions that all explain the train data well. We then construct a Gaussian distribution that captures these different solutions traversed by SGD, and use it as our approximation to the posterior. It turns out that this simple procedure captures the local Geometry of the posterior remarkably well.”
Based on the paper by wesley maddox, timur garipov, pavel izmailov, dmitry vetrov, andrew gordon wilson. Visualization is a collaboration between pavel izmailov, timur garipov and javier ideami@losslandscape.com. NeurIPS 2019, ARXIV:1902.02476 | losslandscape.com..
- Kategori
- Belgesel
Yorum yazmak için Giriş yap ya da Üye ol .
Henüz yorum yapılmamış. İlk yorumu siz yapın.
Up Next
Autoplay
-
02:33

Palestinian students' future uncertain amid Israeli demolitions
-
01:01
SENTINEL | Dynamics of Gradient Descent and its loss landscape | Deep Learning
-
01:00
ICARUS - Visualizing Mode Connectivity | A.I Deep Learning
-
02:26
Trump and Putin call leaves NATO uncertain about the future of Kiev
-
03:20
Ukraine’s future uncertain as US talks to Russia
-
00:41
EDGE HORIZON | 1 Million Point Loss Landscape | Gradient Descent | Deep Learning
-
00:37
GOBLIN | Dynamics of the Loss Landscape of Gradient Descent | Deep Learning
-
00:51
DOWN UNDER | Below the loss landscape of gradient descent | Deep Learning
-
03:42
Syrian Refugees Face an Uncertain Future
-
02:59
Macron faces uncertain future in Sunday's presidential election
-
00:46
GENTLY | Following the gentle descent | Deep Learning
-
1:03:29
Turkish Deep & Vocal - Türkçe Deep 2018 Best Special Mix By Dj Jambo
-
11:30
Learning More about Learning Differences: Karinda Barrett at TEDxTCC
-
00:36
Journey to the depths of the Loss Landscape | Deep Learning Gradient Descent Visualizations
-
01:27
LR COASTER | Loss Landscape morphology & dynamics visualization | Deep Learning
-
02:11
Ukraine gains territory, grain deal renewal uncertain
-
28:26
Volcanic exodus - An Icelandic town's uncertain future | DW Documentary
-
00:45
The Loss Landscape | Deep Learning & Gradient Descent
-
18:17
The future of learning, learning for the future: Bea Beste at TEDxTUHH
-
00:59
Ukraine's President uncertain over attending talks in Istanbul
-
02:57
Around 1M refugees frustrated over uncertain future
-
07:25
The Journey Begins - First Descent: Michoacan - Ep 1